
En el siguiente tutorial aprenderemos a controlar motores paso a paso con Arduino y el driver L298. Este controlador puede gestionar cargas de hasta 35V y 2A, por lo que está especialmente indicado para motores de tamaño medio-alto.
Esquema
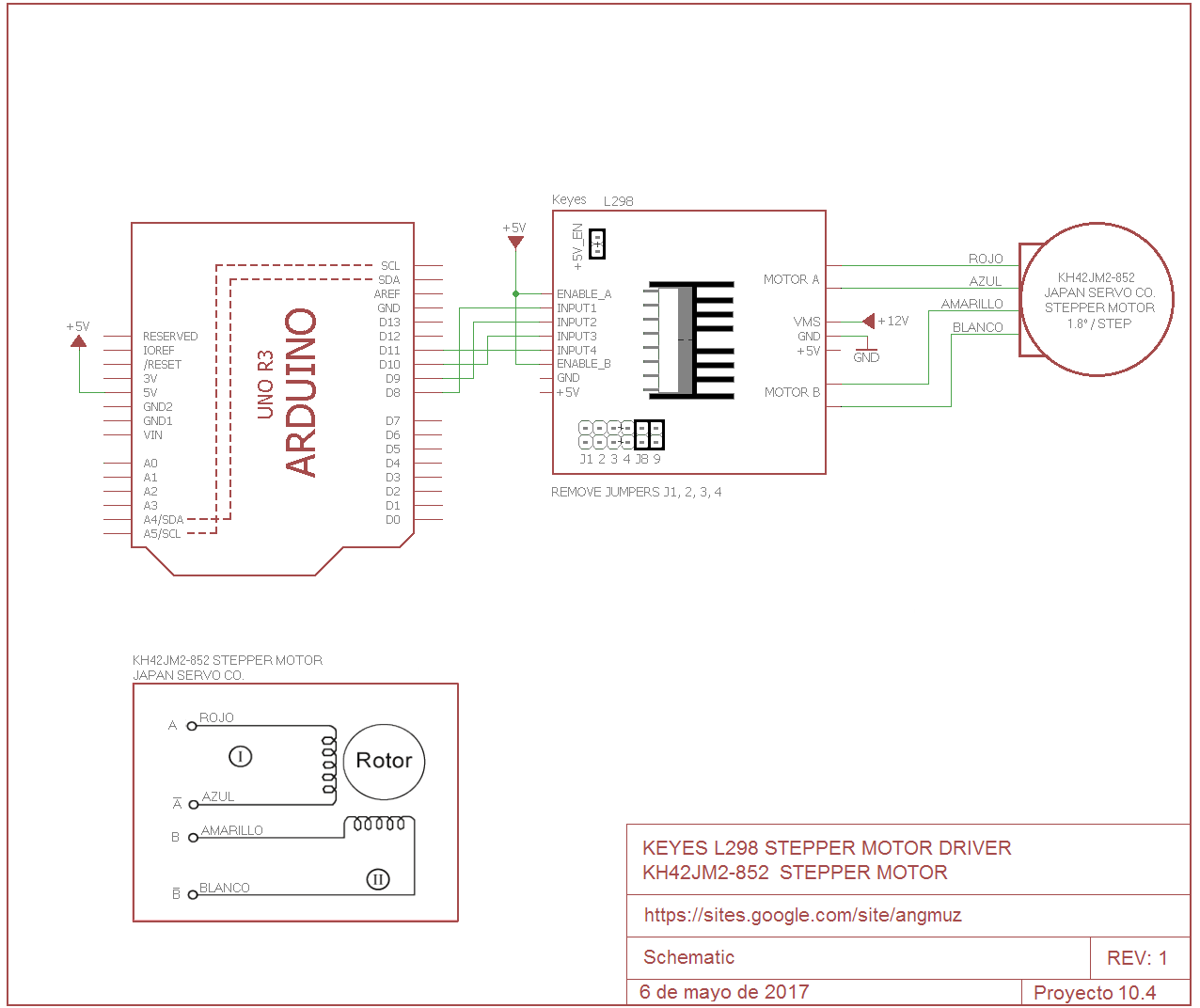
El siguiente esquema muestra la conexión de un motor paso a paso NEMA 17, concretamente un modelo KH42JM2-852 de Japan Servo Co. ver datasheet al final de la página.
Las entradas EN_A y EN_B se conectan a +5V. Y las entradas IN_1 a IN_4 se conectan a los pines D8 a D11. Se pueden conectar a cualquier otro pin del Arduino si así lo deseamos, pero lo he conectado de esta manera para aprovechar los ejemplos ya creados que vienen con la librería Stepper.
Sketch
Vamos a ver un ejemplo sencillo. El siguiente sketch hace que nuestro motor gire una vuelta en sentido horario y otra en antihorario, con una pausa de 500ms entre ambas.
Este código está disponible en Ejemplos→Stepper→stepper_oneRevolution

/*
Stepper Motor Control - one revolution
This program drives a unipolar or bipolar stepper motor.
The motor is attached to digital pins 8 - 11 of the Arduino.
The motor should revolve one revolution in one direction, then
one revolution in the other direction.
Created 11 Mar. 2007
Modified 30 Nov. 2009
by Tom Igoe
*/
#include <Stepper.h>
const int stepsPerRevolution = 200; // change this to fit the number of steps per revolution
// for your motor
// initialize the stepper library on pins 8 through 11:
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
void setup() {
// set the speed at 60 rpm:
myStepper.setSpeed(60);
// initialize the serial port:
Serial.begin(9600);
}
void loop() {
// step one revolution in one direction:
Serial.println("clockwise");
myStepper.step(stepsPerRevolution);
delay(500);
// step one revolution in the other direction:
Serial.println("counterclockwise");
myStepper.step(-stepsPerRevolution);
delay(500);
}
Este ejemplo puede servir para probar motores paso a paso y verificar su correcto funcionamiento.
Links
Más información sobre la librería Stepper y los motores paso a paso.
Tutorial sobre el driver L298 en tronixstuff.com
No hay comentarios.:
Publicar un comentario